главная » уроки анимации

Уроки анимации
Глава 9.
Ходьба
и перемещение
Наступило
время заняться воспроизведением ходьбы и бега. Эти действия требуют соблюдения
равновесия и координации движения различных частей тела.
Манера ходьбы
передает индивидуальность персонажа. Как известно, походка каждого человека
уникальна. Некоторые идут вразвалочку, другие ковыляют, третьи волочат ноги.
Все персонажи Мэй Уэст (Мае West), Гручо Маркса (Groucho Marx), Джона Уэйна
(John Wayne) и Чарли Чаплина имели своеобразную походку. Чтобы узнать характер
героя, нужно разгадать его походку.
Для анимации
ходьбы в распоряжении компьютерных художников имеется множество инструментов,
каждый из которых имеет свои преимущества и недостатки. При их использовании
вы должны учитывать законы движения и хорошо представлять себе манеру ходьбы
персонажей.
Ходьбу можно
описать как «управляемое падение». При каждом шаге человек наклоняется
вперед и начинает падение, которому препятствует выдвигающаяся нога. После того
как она касается земли, на нее переносится вес тела, и колено сгибается, амортизируя
падение. Затем нога выпрямляется, поднимая тело и сообщая ему импульс движения;
выносится другая нога, и цикл повторяется.
А сейчас встаньте
и немного пройдитесь по комнате, наблюдая за движением различных частей тела.
Каждая часть тела - от стоп и рук до головы -совершает свою последовательность
действий. Обратите внимание на то, как вы наклоняетесь вперед, начиная движение,
и как ноге передается вес тела, что предотвращает его падение. Если нога задержится,
вы упадете.
Ходьба - очень
сложный процесс, состоящий не только из перемещения ступней по земле, но и синхронного
движения бедер, позвоночника, рук и плеч для поддержания равновесия туловища.
Если разделить ходьбу на движения отдельных суставов, то ее механика станет
более понятной.
На компакт-диске
в папке Chapter09 находятся четыре анимационных ролика, демонстрирующих ходьбу
с четырех различных точек: Walk-1. avi, Walk-2.avi, Walk-3.avi u\tlalk-4.avi
(или Walkl.mov, Walk2.mov, WalkS.mov и Walk4. mov для пользователей компьютеров
Macintosh). Используйте их в качестве примера.
Ноги и ступни
толкают тело вперед. Чтобы персонаж выглядел естественно, его конечности должны
быть всегда немного согнуты в суставах, даже при полностью выпрямленной ноге.
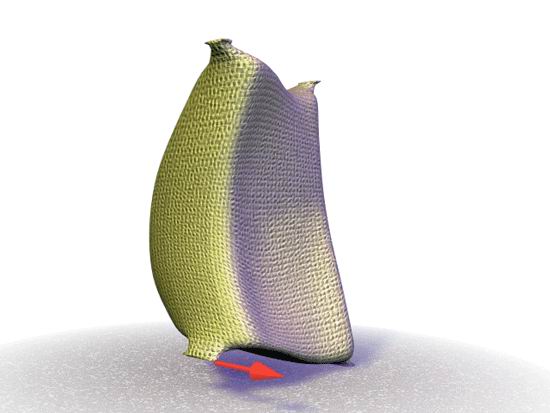
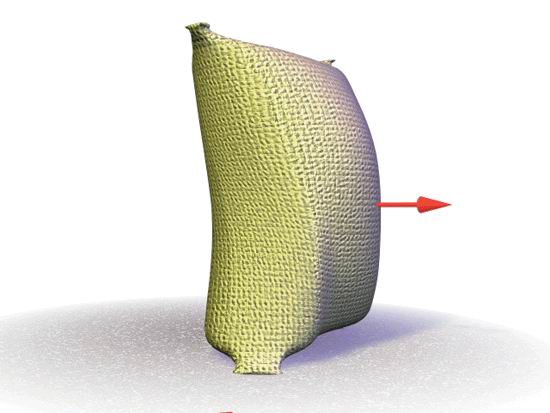
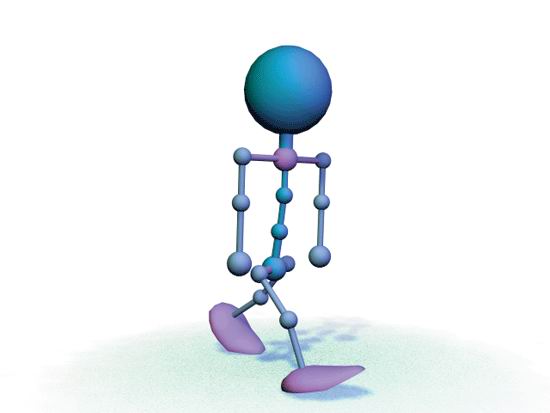
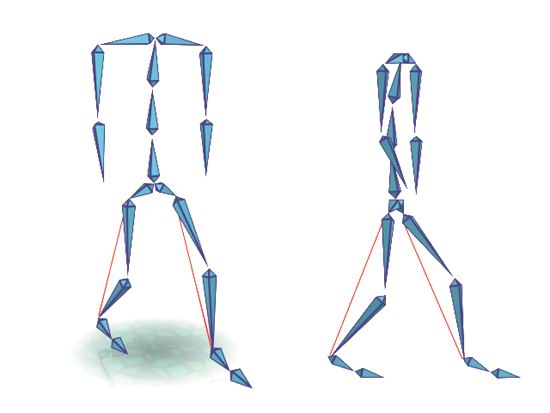
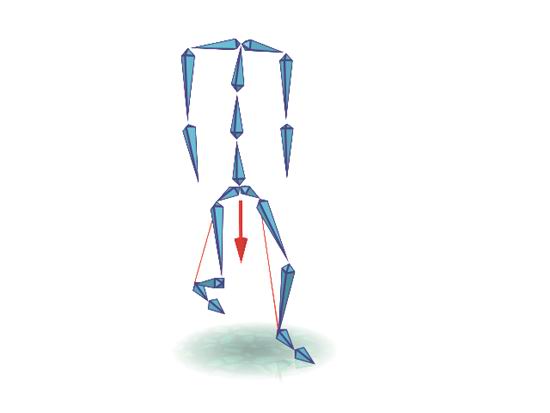
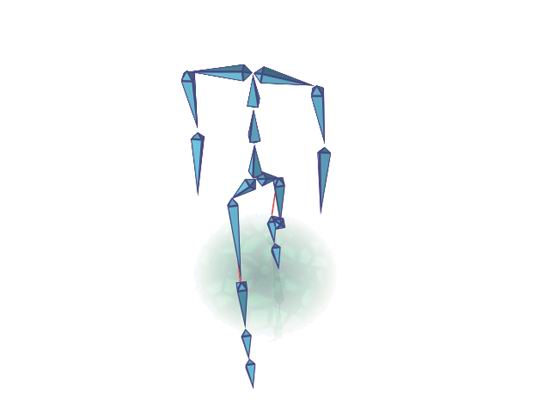
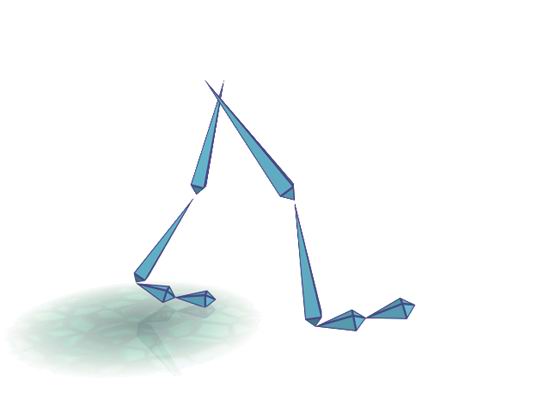
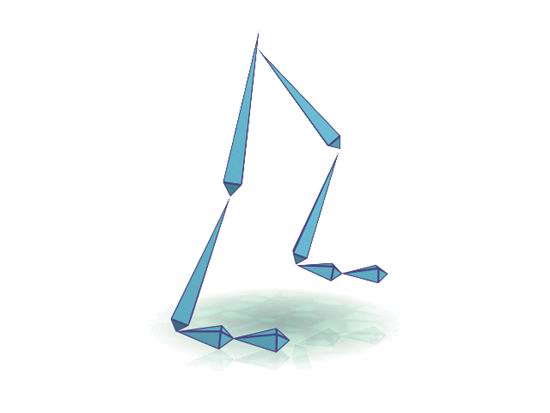
Движение обычно начинается с позы, в которой ступни разнесены на некоторое расстояние,
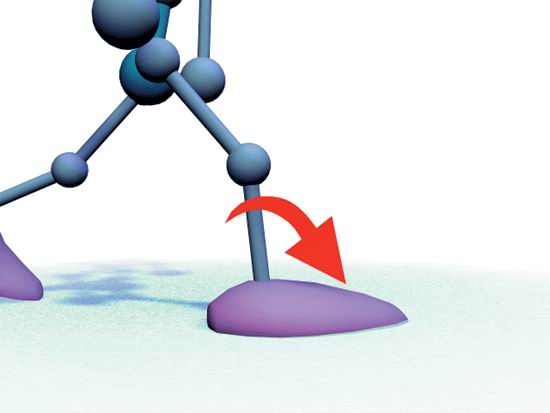
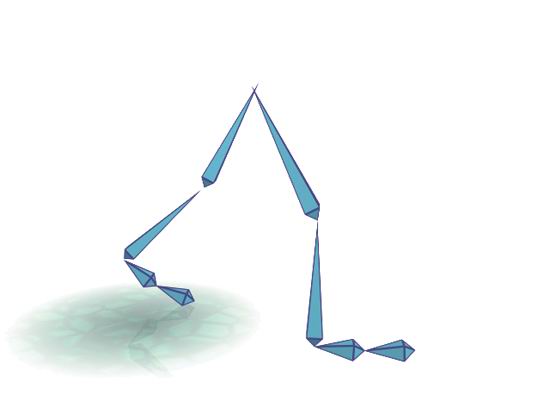
и вес тела перенесен на вынесенную вперед ногу (рис. 9.1). Далее колено этой
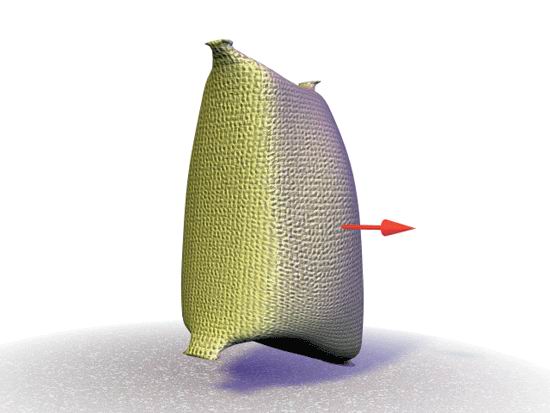
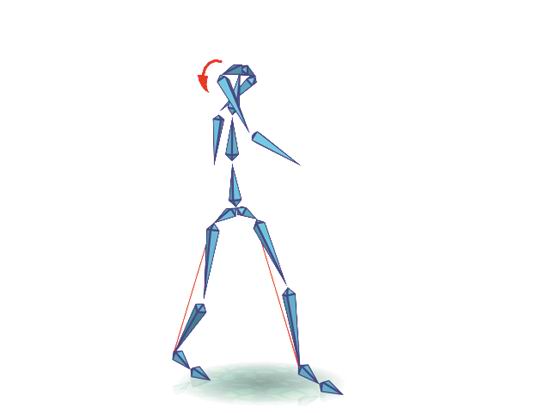
ноги сгибается под тяжестью тела. Такая позиция называется позицией отдачи
и соответствует самой нижней части траектории центра тяжести персонажа (рис.
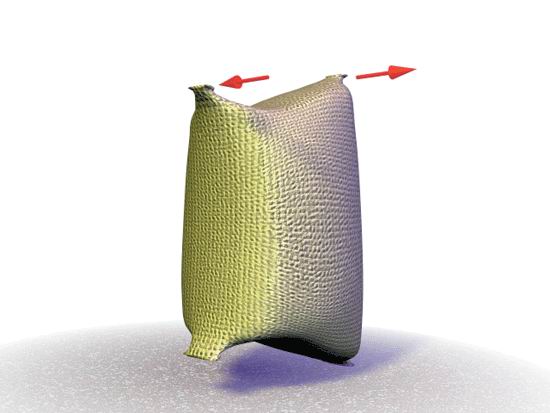
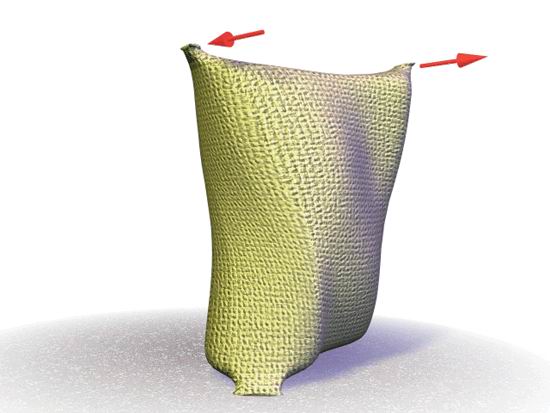
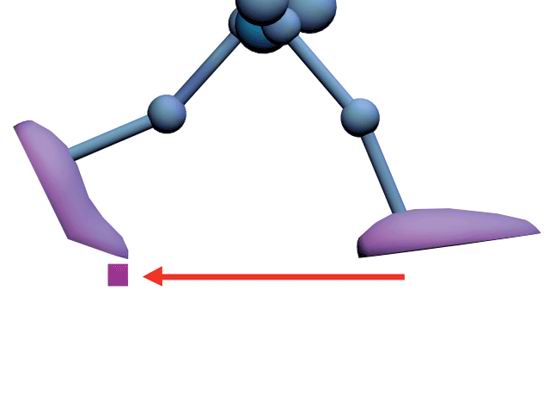
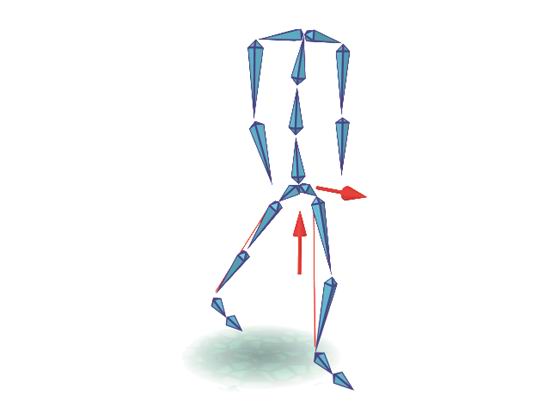
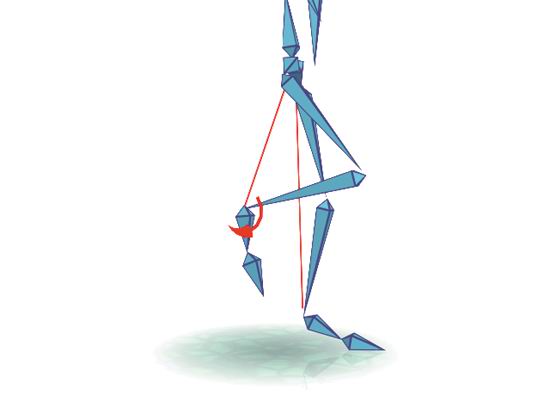
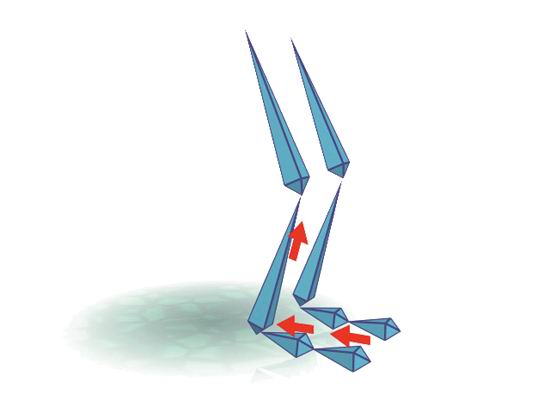
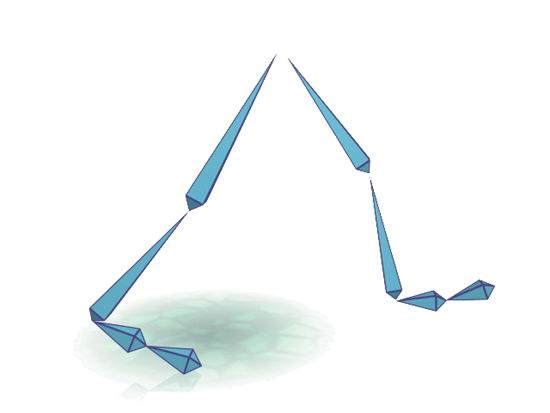
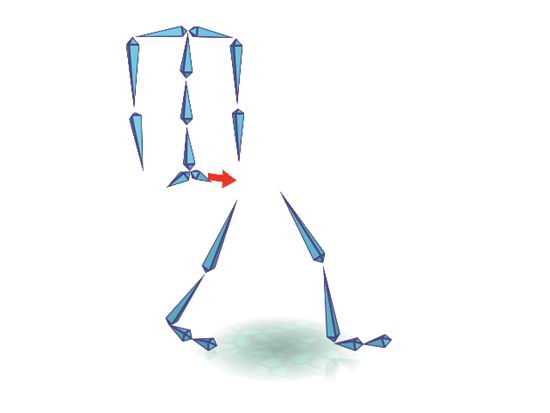
9.2). В момент совершения ногой половины первого шага центр тяжести тела находится
в самой верхней точке. Данная позиция называется проходной, так как свободная
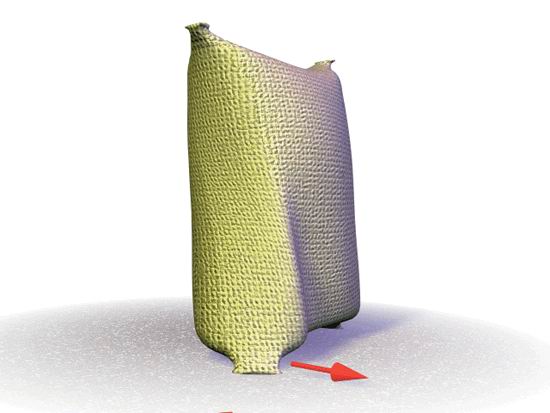
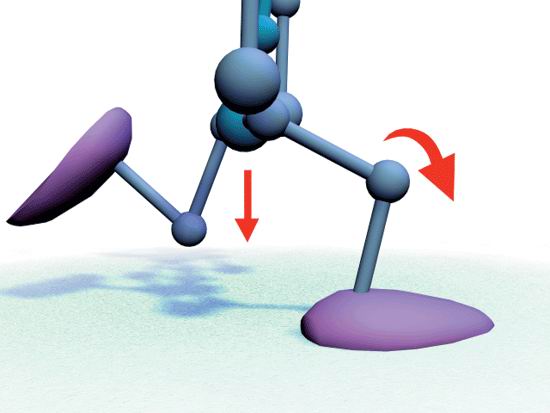
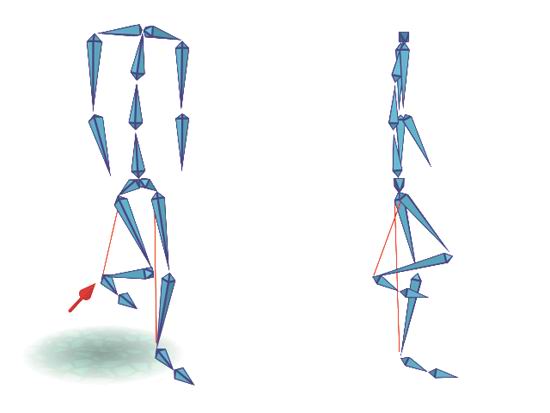
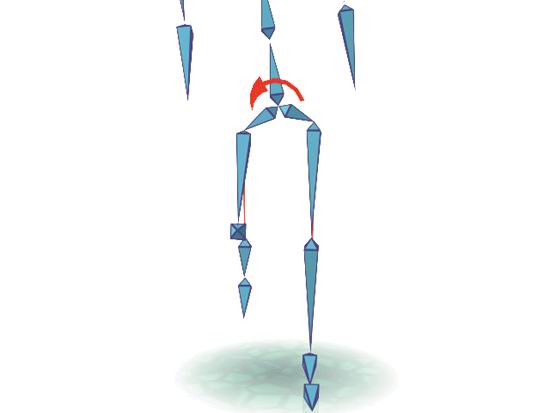
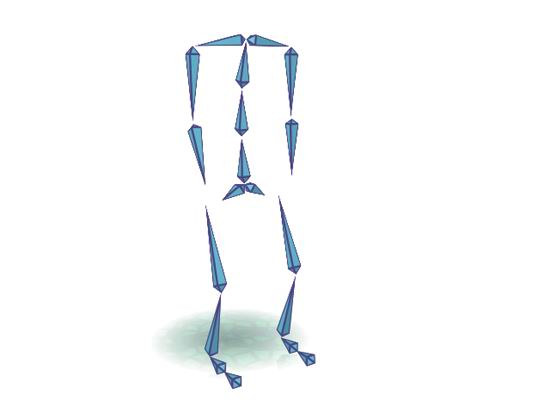
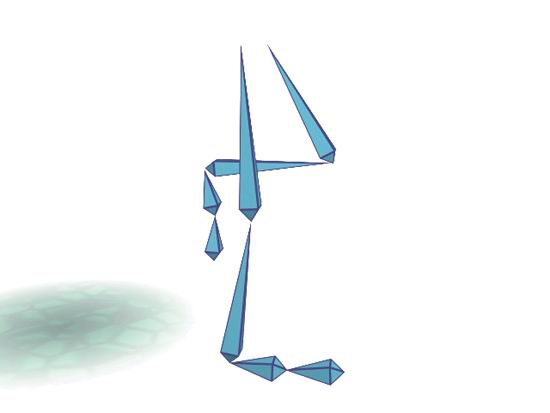
нога в этот момент проходит мимо опорной (рис. 9.3) По мере продвижения персонажа
пятка стопы, на которую приходится вес тела, отрывается от земли, передавая
усилие ноге. Тело начинает падать вперед. Свободная нога совершает мах вперед
подобно маятнику (рис. 9.4), а затем касается земли, завершая половину цикла
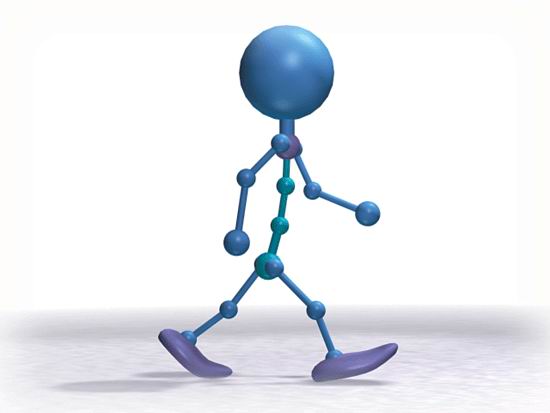
Рис. 9.1.
Начальная поза для анимации ходьбы

Рис. 9.2.
Позиция отдачи
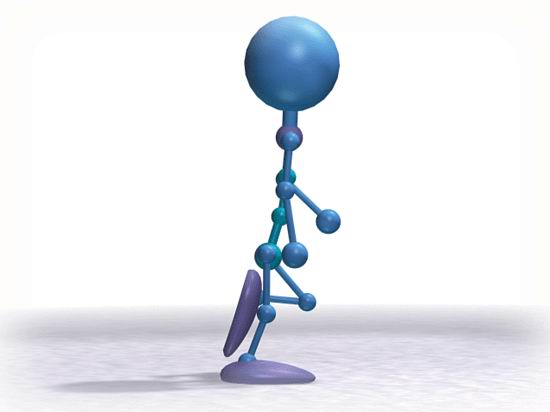
Рис. 9.3.
Проходная позиция
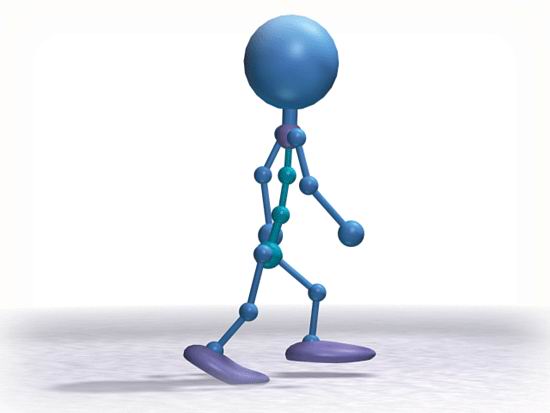
Рис. 9.4.
Момент падения на свободную ногу
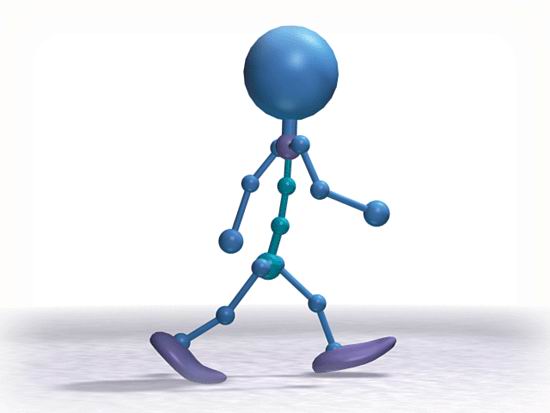
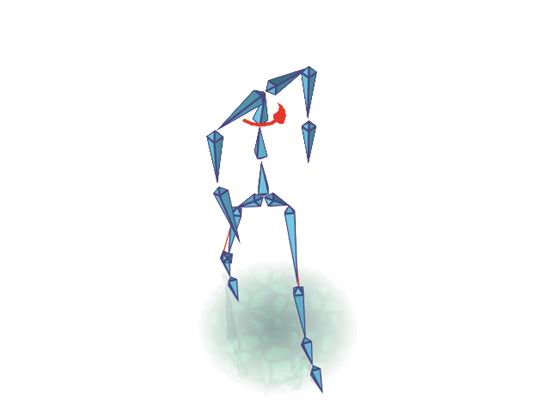
Рис. 9.5.
Завершающий кадр половины цикла
(рис. 9.5).
Вторая половина является зеркальным отражением первой. Если они будут различаться,
то возникнет впечатление, что персонаж хромает.
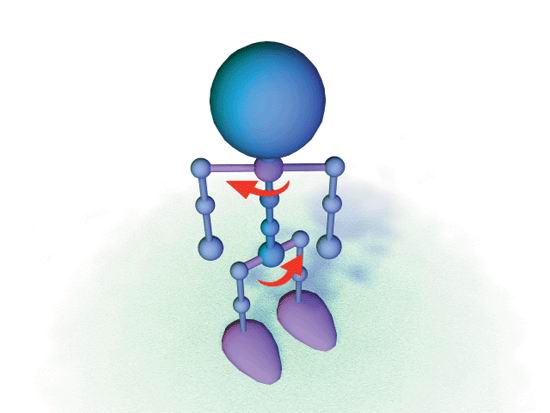
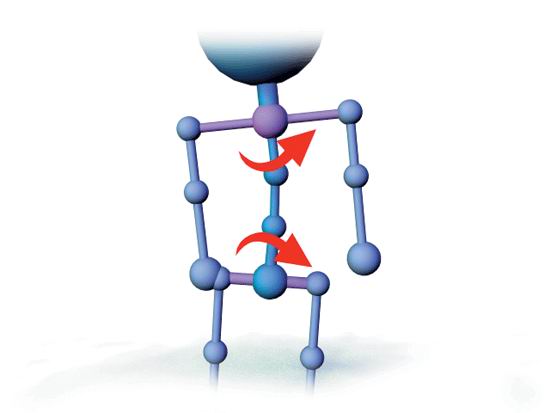
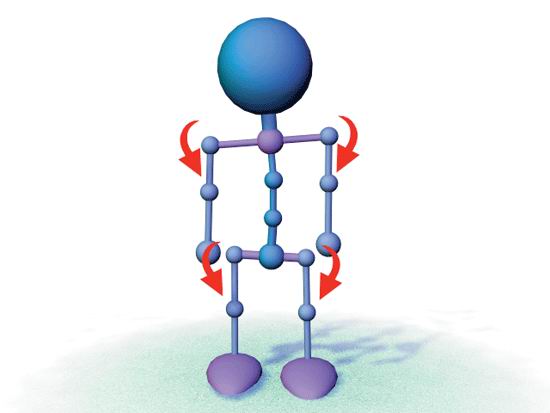
Центр тяжести
тела находится в области таза; равновесие и движение остальных частей тела связаны
с его положением. Лучше всего представить движение таза во время ходьбы как
комбинацию двух вращательных движений. Во-первых, он вращается вокруг оси позвоночника,
выдвигаясь вперед и назад в момент перемещения ног. Если вперед идет правая
нога, то правое бедро, поворачиваясь, выносится вперед. Во-вторых, в проходной
позиции свободная нога способствует смещению центра тяжести, приводя к наклону
таза вбок. Эти два вращательные движения передаются через позвоночник к плечам,
поворот которых для поддержания равновесия зеркально отражает перемещение бедер.
Когда стопы максимально раздвинуты, таз повернут относительно оси позвоночника.
Для поддержания равновесия плечи поворачиваются в противоположную сторону. Это
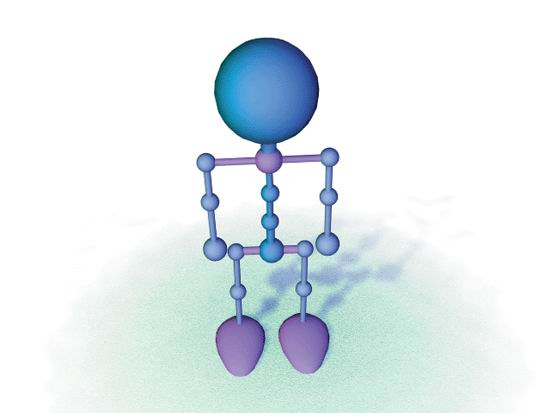
хорошо видно, если смотреть на туловище сверху (рис. 9.6). В проходной позиции
при взгляде на туловище спереди заметно, что вес свободной ноги смещает центр
тяжести тела, и плечи поворачиваются в противоположном направлении. В виде сверху
плечи и таз почти параллельны. Таз смещается в сторону от свободной ноги (рис.
9.7). Если вес тела персонажа равномерно распределен в процессе движения, то
походка выглядит статичной и неживой. Когда выносится вторая нога, то в виде
спереди таз и плечи снова занимают положение, в котором параллельны друг другу.
При взгляде на туловище сверху виден поворот плеч и таза (рис. 9.8)
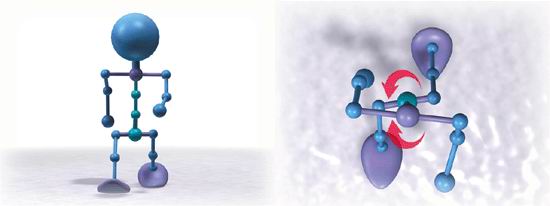
Рис. 9.6.
Положение тела при максимально разведенных стопах
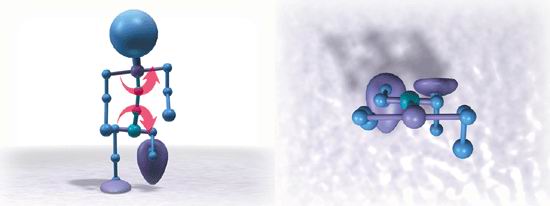
Рис. 9.7.
Положение тела в проходной позиции
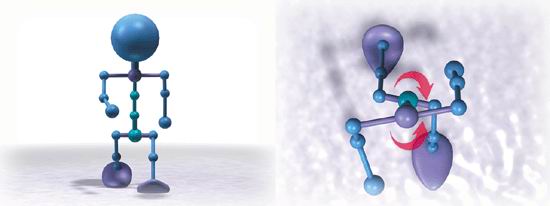
Рис. 9.8.
Положение тела при выносе второй ноги
Если персонаж
не жестикулирует или не держит что-то, его руки, как правило, свободно висят.
Во время ходьбы они раскачиваются подобно маятнику, отставая на несколько кадров
от движения таза и плеч. Чтобы руки выглядели естественно, они должны быть немного
согнуты в локтях, даже когда персонаж показывает на какой-то далекий предмет.
Движение
головы и позвоночника
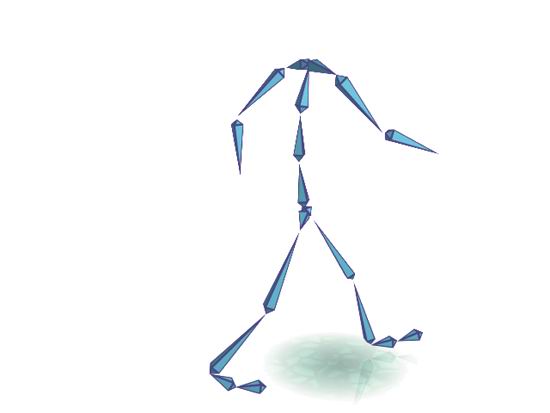
Взглянув на
позвоночник персонажа сбоку, можно определить основную его позу - выпрямленную
или сутулую, в зависимости от осанки. Так как в процессе ходьбы возникает падение,
тело немного наклонено вперед. На рис. 9.9 показано, что позвоночник слегка
изогнут назад, благодаря чему грудная клетка и голова не заваливаются вперед,
а находятся над тазом. Подобные изгибы (вперед и назад) появляются и потому,
что позвоночник частично поглощает толчки, которые передаются тазу через ноги.
При ходьбе
движение головы почти прямолинейное. Она слегка покачивается в ту или иную сторону
для поддержания равновесия, а глаза смотрят в направлении перемещения. Если
персонаж взволнован, покачивания головой носят более выраженный характер. Грустный
персонаж идет, опустив голову, или озирается, если ищет что-то. Если персонаж
чем-то расстроен, он сутулится и низко опускает голову. При этом таз поворачивается
в обратном направлении, поддерживая равновесие тела. Возможно, при этом персонаж
будет волочить ноги (рис. 9.10).
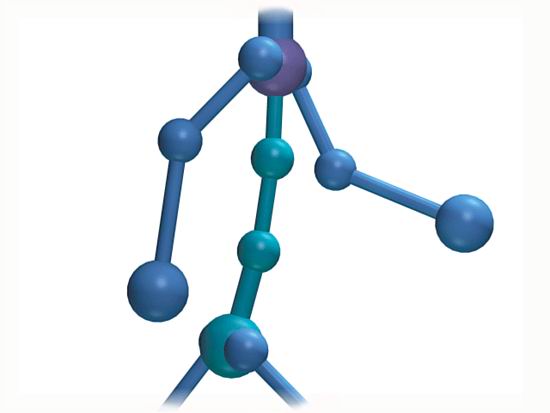
Рис. 9.9. Изгиб позвоночника
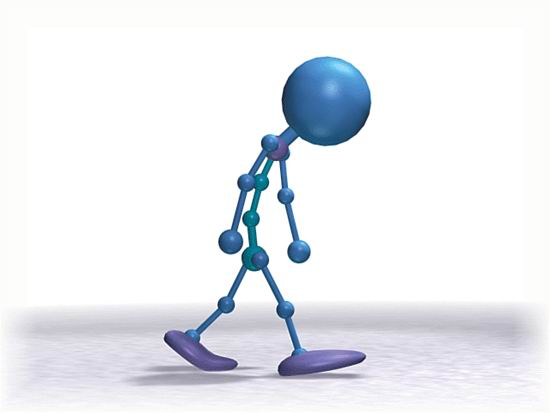
Рис. 9.10.
Походка грустного при ходьбе персонажа
Создать цикл
ходьбы методами традиционной анимации достаточно сложно. Но и при использовании
компьютера сделать это не намного проще.
![]() При
анимации нескольких персонажей возникает искушение заставить их двигаться с
одинаковой скоростью, что упрощает процесс работы. Однако если все персонажи
имеют одинаковый темп ходьбы, то возникает ощущение, будто они идут строевым
маршем, и сцена выглядит неестественно. Лучше, если, например, шаг одного из
действующих лиц занимает 12 кадров, а походка другого персонажа более быстрая
или, наоборот, медленная - 15 или 10 кадров на шаг. Сцена от этого только выиграет.
При
анимации нескольких персонажей возникает искушение заставить их двигаться с
одинаковой скоростью, что упрощает процесс работы. Однако если все персонажи
имеют одинаковый темп ходьбы, то возникает ощущение, будто они идут строевым
маршем, и сцена выглядит неестественно. Лучше, если, например, шаг одного из
действующих лиц занимает 12 кадров, а походка другого персонажа более быстрая
или, наоборот, медленная - 15 или 10 кадров на шаг. Сцена от этого только выиграет.
Прежде всего
необходимо рассчитать время, затрачиваемое на ходьбу. Сколько кадров она займет?
При ответе на этот вопрос необходимо учитывать множество факторов. Будет ли
персонаж большим, двигаясь неуклюже, или маленьким и подвижным? Он будет идти
или бежать? В каком настроении герой?
Один шаг обычной
походки занимает примерно 1/3-2/3 секунды (8-16 кадров при частоте 24 кадра
в секунду, или 10-20 кадров при частоте 30 кадров в секунду). Полный цикл (шаги
левой и правой ног) длится около 1 секунды. Более крупные персонажи идут медленнее,
герои маленькие -быстрее. Мужская походка обычно характеризуется более степенными
движениями, чем женская; грустные персонажи передвигаются медленнее, чем счастливые.
Большинство
программ позволяет менять продолжительность анимации. Если персонаж идет слишком
медленно, можно заставить его двигаться быстрее, сдвинув ключевые кадры во времени.
При анимации
ходьбы очень важно помнить о том, что ноги персонажа ступают по земле. Герой
совершает движение благодаря трению между стопой и поверхностью земли. Если
нога скользит, то анимация выглядит неестественной. (Проскальзывание, однако,
может быть и смешным, если персонаж наступает на корку от банана или пятно масла.)
Выполнение
привязки стоп к поверхности земли зависит от характеристик программного обеспечения.
Во многих, но не во всех пакетах, есть инструменты, облегчающие выполнение этой
задачи (рис. 9.11-9.13). К популярным методам относятся следующие:
- инверсная кинематика
с ограничителями является одним из самых удачных методов, так как гарантирует
фиксированное положени§ стопы во время шага. Это позволяет аниматору
забыть о лишних деталях и сосредоточиться на более важных вещах, например,
позе персонажа;
- генераторы шагов -
это подключаемые модули, позволяющие персонажу делать все, что угодно: идти
по земле, подниматься по склону, спускаться по лестнице. Программа автоматически
перемещает ноги и стопы персонажа. Обычно движение рассчитывается на основе
веса и динамики персонажа.
Использование
подключаемых модулей подходит для первого просмотра, и только для этого. Недостаток
данного метода заключается в том, что движение рассчитывается начиная со стоп.
При отладке анимации следует учитывать это, так как в действительности движение
при ходьбе начинается с бедер. Аниматор вынужден управлять процессом, чтобы
придать походке индивидуальность. Он должен проработать позы и движение во время
второго и третьего просмотров, внося в походку персонажа характерные особенности
и делая его запоминающимся;
- обратная, или нарушенная
иерархия, не требует применения ИК-цепочки и работает во всех пакетах, поддерживающих
метод прямой кинематики. В иерархическом дереве таз занимает вершину, а позвоночник
и ноги являются его потомками. Подобное расположение может привести к проблемам,
если не существует способа зафиксировать стопы персонажа, так как при движении
таза начнут перемещаться и позвоночник, и ноги, и стопы.
При использовании
метода обратной иерархии дерево переворачивается и рассекается в точке таза.
Стопы становятся предками ног, что позволяет свободно перемещать их. Они являются
началом иерархии, следовательно, нет причин опасаться, что они переместятся
в результате изменения положения какой-либо части тела. Объект в иерархии не
может иметь более одного родителя, поэтому таз должен быть отсоединен от ног
и двигаться независимо от них. Затем анимация таза выполняется отдельно, чтобы
его движение соответствовало перемещению ног. При этом довольно сложно точно
согласовать движения, и данный метод больше подходит для персонажей, бедра которых
скрыты, - будь то банка газировки с ногами или персонаж, одетый в юбку. Способ
пригоден и при использовании костей, ибо кожа персонажа обычно скрывает большинство
недостатков положения таза. Кроме того, проскальзывание ног гораздо больше бросается
в глаза, чем несогласованные движения бедер, следовательно, нужно выбирать меньшее
из двух зол;
- метод прямой кинематики
с направляющими выручит вас, если ни один из перечисленных способов по тем
или иным причинам не подходит. Чтобы упростить процесс задания ключевых кадров
вручную, можно использовать направляющие для стоп. Все пакеты позволяют помещать
пустые, ложные или прозрачные объекты в качестве виртуальных меток. Если стопа
сдвигается в сторону от правильного положения, то можно прибегнуть к этим
меткам как к точкам отсчета для возврата ее в нужное место.
Некоторые
пакеты дают возможность работать с полупрозрачным изображением предыдущего кадра
в качестве фона (в традиционной анимации с этой целью использовался стол с подсветкой).
Выравнивание стоп в данном случае значительно упрощается.
И, наконец,
некоторые художники-аниматоры используют стираемые маркеры, рисуя направляющие
прямо на экране компьютера. Затем их стирают сухой тряпкой. Будьте осторожны
- не возьмите по ошибке нестираемый маркер! На экран помещаются также наклейки
с карандашными пометками.
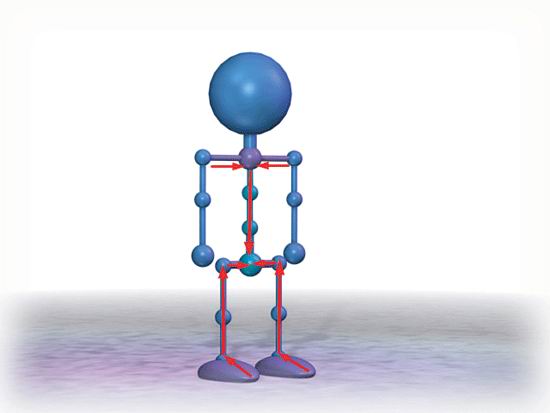
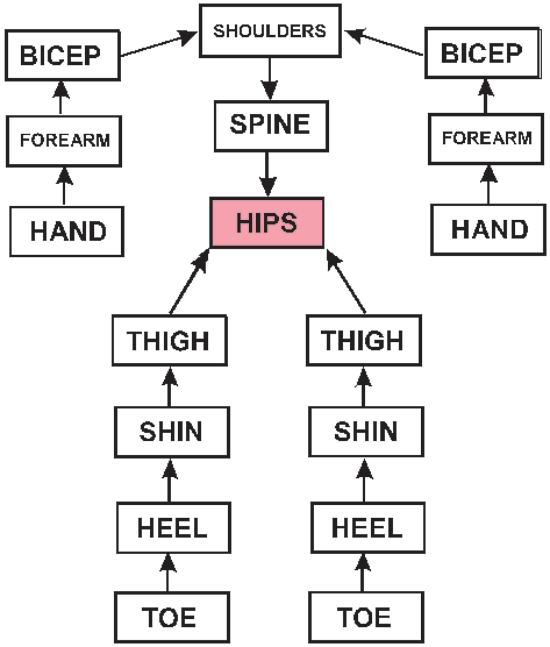
Рис. 9.11.
В методе прямой иерархии все суставы привязаны к тазу - при его перемещении
движется все тело. В данном методе ноги могут проскальзывать
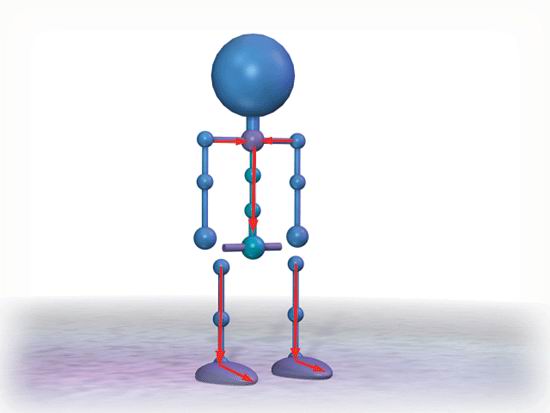
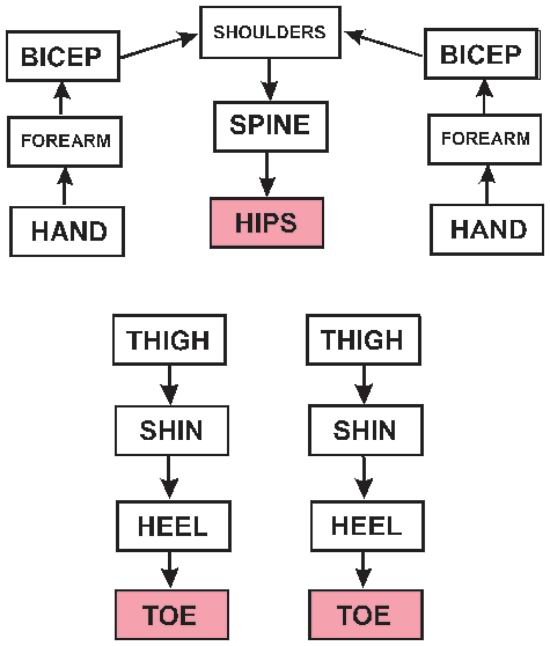
Рис. 9.12.
При использовании метода обратной иерархии связь разрывается в точке таза,
и ступни становятся предками ног. Движение стоп полностью контролируется,
и они не проскальзывают
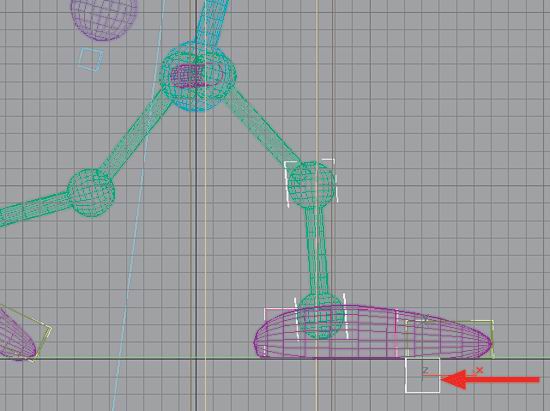
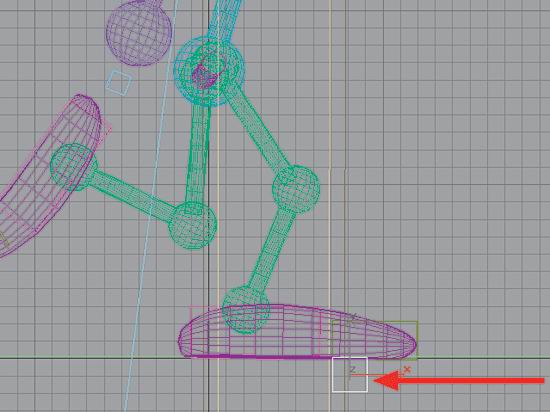
Рис. 9.13.
Этот прямоугольник используется в качестве направляющей, находящейся
под стопой. Выравнивая опорную точку стопы по направляющей, аниматор устраняет
эффект проскальзывания
Так как ходьба
является циклическим движением, для ее воспроизведения можно использовать цикл,
а не прямую анимацию. Правильно созданный цикл позволяет сэкономить массу времени.
Один и тот же цикл задействуется в разных сценах. Одинаково шагающий персонаж
может участвовать в сцене на улице или на проселочной дороге, так как везде
он совершает практически одни и те же движения. Классические художники-аниматоры
обращались к этому приему, повторяя последовательность рисунков и меняя фон
при переносе персонажа в другую обстановку. В трехмерной графике положение камеры,
освещение и место действия варьируются, что позволяет изменять кадр до неузнаваемости.
Один и тот
же цикл, снятый камерой под другим углом, выглядит совсем по-иному. Данный эффект
может как помогать, так и мешать аниматору. Если вы работаете над анимацией
игры, и персонаж обладает характерной походкой, она должна выглядеть примерно
одинаково при съемке под различными углами. При анимации движения толпы можно
использовать одну и ту же походку, снятую под разными углами: при этом будет
казаться, что персонажи ходят по-разному.
Художники,
выполняющие анимацию в играх и интерактивных проектах, работают с циклами постоянно.
Большинство алгоритмов игровых программ требует, чтобы анимация персонажей выполнялась
в циклах, вызываемых джойстиком. Возможно, в подобных ситуациях вам придется
создавать небольшие анимации продолжительностью 3-6 кадров, которые называются
связками и предназначены для заполнения промежутков между циклами, например,
ходьбой и бегом.
Использование
циклов имеет и свои недостатки. Во-первых, они могут довольно быстро наскучить,
особенно если будут продолжительными. Во-вторых, циклы больше подходят Для прямолинейного
движения по ровной поверхности. Если персонаж поворачивает за угол или поднимается
по склону, циклические движения не слишком хорошо совмещаются с другими действиями.
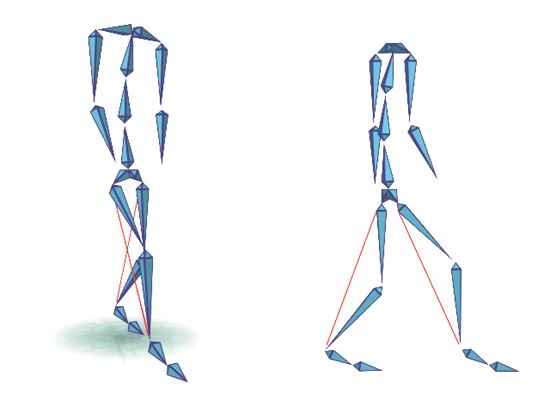
В цикле персонаж
перемещается будто по бегущей дорожке. На рис. 9.14 показаны наложенные друг
на друга разные фазы цикла движения. Как

Рис. 9.14.
Фазы цикла ходьбы
видите, тело
не меняет своего положения — перемещаются ноги. Как показывает шкала внизу,
в каждом кадре ноги перемещаются на одинаковое расстояние. Это позволяет избежать
проскальзывания. Кроме того, чтобы создать иллюзию ходьбы, тело героя должно
перемещаться относительно земли (или она должна двигаться в обратную сторону)
с той же скоростью, с которой движутся ноги.
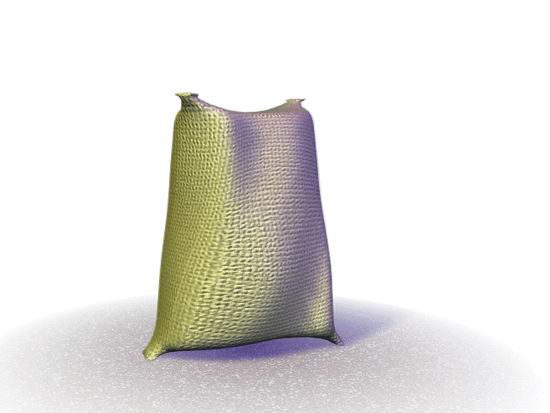
Упражнение
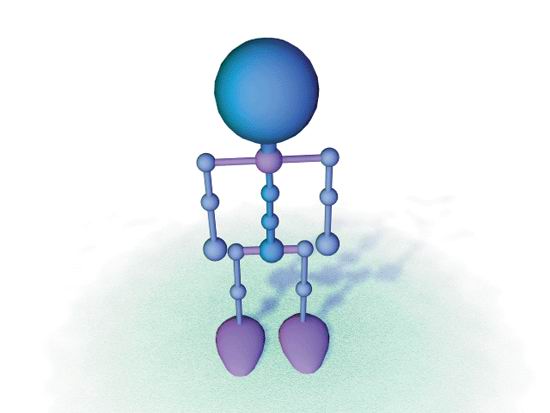
1. Имитация ходьбы мешка с мукой
Чтобы научиться
правильно воспроизводить ходьбу, выполните упражнение по анимации такого персонажа,
как мешок с мукой. Представьте его углы бедрами и плечами и вы поймете, как
движутся эти части тела при ходьбе. Успех анимации мешка в определенной мере
зависит от того, как выполнена его деформация. Наилучших результатов можно достичь,
если поместить четыре кости в углы, а пятую — в центр. Получится достаточно
простая структура, и вам не придется связывать кости в иерархию, что также облегчает
размещение стоп и предотвращает их проскальзывание. Один шаг занимает 12 кадров,
полный цикл составляют 24 шага.
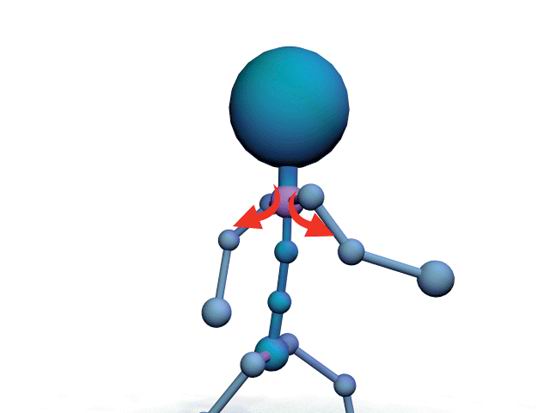
1. Вначале
немного разнесите стопы. Выдвиньте левую вперед, а правую назад. Чтобы восстановить
равновесие, разверните плечи в обратную сторону. Выдвиньте правое вперед, а
левое назад. Задайте ключи для плеч и ступней.
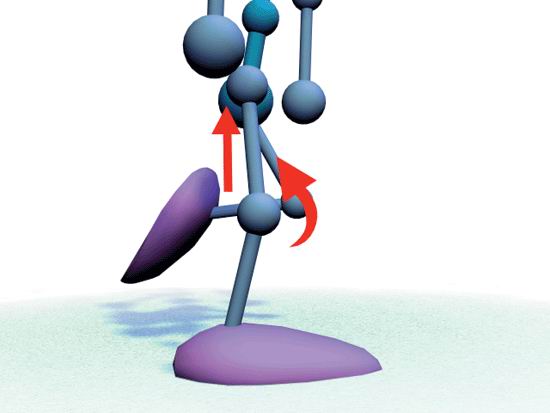
2. Перейдите
к кадру 6, который соответствует середине первого шага. Переместите правую ступню
вверх и вперед, выровняв ее с левой. Задайте ключ.
3. Переместите
вперед кость, расположенную в центре тела, чтобы сбалансировать вес, и задайте
ключ.
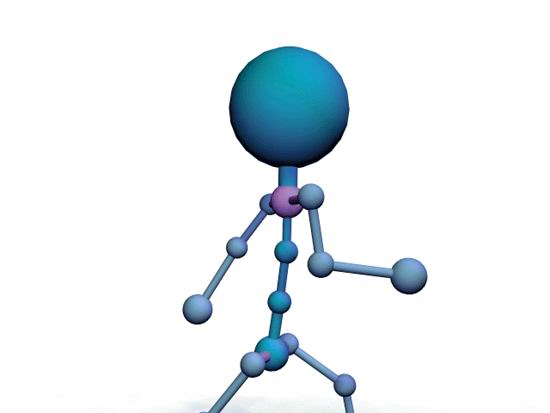
4. Уравновесьте
верхнюю часть тела. Помните, что положение плеч отражает положение таза. Переместите
правое плечо вниз и назад, а левое - вверх и вперед. Задайте ключи для обоих
плеч.
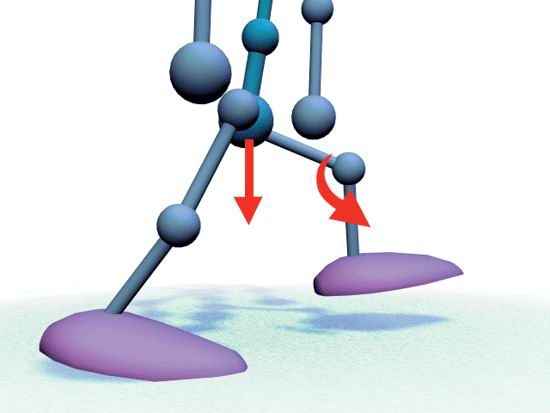
5. Выполните
конец шага (и начало следующего). Переместите правую ногу вперед и поставьте
ее на землю. Задайте ключи для обеих ног.
6. Переместите
центральную кость вперед, чтобы центр тяжести тела находился между ногами. Задайте
ключ.
7. Переместите
левое плечо вверх и вперед, а правое - вниз и назад. Задайте ключи для обоих
плеч.
На этом первый
шаг завершен. Повторите процедуру для другой ноги, создав полный цикл, а затем
повторите цикл столько раз, сколько шагов должен сделать персонаж.
Чтобы сделать
походку более правдоподобной, можно заставить живот мешка раскачиваться при
ходьбе. Учтите, что движения живота (положение которого задается при помощи
центральной кости) немного запаздывают. Не забудьте показать, что живот отвисает.
Постарайтесь сделать так, чтобы центральная кость немного двигалась вверх-вниз.
Например, когда правая нога перемещается вверх, центральная кость отстает от
нее на 2 или 3 кадра, поэтому поднимается чуть позже.
Упражнение
2. Анимация цикла ходьбы методом прямой кинематики
В этом упражнении
необходимо выполнить анимацию цикла ходьбы без цепочки инверсной кинематики,
или привязки. Данный способ считается самым надежным, поскольку он работает
практически во всех пакетах программ. Выполнение шага занимает 16 кадров, а
полный цикл составляет 32 кадра. В упражнении используется упрощенный скелет,
но те же методы годятся для имитации ходьбы любого двуногого персонажа. Наличие
инструмента для фиксации ступни персонажа на земле желательно, но не обязательно.
Загрузите
персонаж и иерархический скелет в программу анимации. Создайте анимацию продолжительностью
в 33 кадра. Последний из них станет целевым для кадров второй половины цикла
ходьбы и визуализироваться не будет. Начните с анимации таза, так как все остальные
движения исходят от него. Таз совершает независимые друг от друга повороты в
двух плоскостях, а плечи поворачиваются в обратных направлениях.
1. Прежде займемся
размещением таза и плеч. Начните движение с правой ноги, вынеся правое бедро
вперед. В первом кадре поверните таз относительно оси у так, чтобы пррвая
его часть выдвинулась вперед. В виде сверху разверните плечи в противоположную
сторону.
2. Перейдите
к средней точке цикла (кадр 17) и разверните плечи и таз в противоположных друг
другу направлениях. В этот момент таз должен быть немного смещен в сторону,
чтобы центр тяжести находился над ногой, стоящей на земле.
3. Перейдите
к кадру 1 после окончания цикла (кадр 33) и скопируйте ключи из первого кадра.
Он является целевым для промежуточных кадров во второй половине цикла.
4. Теперь нужно
передать качание бедер. Перейдите к кадру, соответствующему середине первого
шага (кадр 9). Если выполнить движение правильно, то на виде сверху бедра и
плечи расположатся параллельно друг другу. В самой высокой точке, соответствующей
проходной позиции, тело опирается на левую ногу, и поднятая правая нога выводит
таз из состояния равновесия.
5. В виде спереди
поверните таз вокруг оси z, чтобы правое бедро было выше левого. Поправьте положение
позвоночника и плеч, чтобы линия позы получилась плавной, и положение плеч зеркально
отражало положение таза.
6. Перейдите
к кадру, соответствующему середине второго шага (кадр 25), и выполните повороты
в направлениях, противоположных тем, которые вы совершили в середине первого
шага. В этой точке тело опирается на правую ногу, а позвоночник изгибается в
противоположном направлении. Таз немного наклонен вправо, чтобы центр тяжести
находился над ногой, стоящей на земле.
7. Поправьте
положение позвоночника в кадрах 1 и 25 так, чтобы он был наклонен вперед и плавно
изогнут.
8. Вернитесь
к каждому из ключевых кадров и поправьте положение ног и рук: они должны быть
расположены вертикально.
9. Проиграйте
цикл. Если движение персонажа происходит без рывков и его позы уравновешены,
переходите к следующему шагу. В противном случае снова поправьте ключевые кадры.
10. Теперь
займитесь движением ног и стоп - возможно, самой сложной частью процесса. Вначале
задайте крайние позиции. Перейдите к кадру 1 в виде сбоку и задайте первую позицию,
в которой ноги-максимально разнесены. Скопируйте ключи в конец цикла (кадр 33).
11. Перейдите
к середине цикла (кадр 17) и зеркально отразите кадр 1 так, чтобы выставить
левую ступню. Для упрощения задачи используйте предыдущие кадры в качестве полупрозрачного
фона и направляющую для позиционирования стоп. Если вы примените блокировки,
последняя, возможно, вам не понадобится. При равномерном распределении промежуточных
кадров между двумя крайними позициями (без ускорения и замедления действий)
движение ноги будет выглядеть автоматическим. В любом случае направляющая позволяет
лучше контролировать процесс.
12. Чтобы создать
направляющую, постройте параллелепипед и поместите его под стоящей на полу передней
ногой персонажа. Поскольку параллелепипед находится ниже уровня пола, зритель
не увидит направляющую после рендеринга. Можно также использовать и нулевой
объект.
13. Перейдите
к кадру 1 и переместите направляющую в горизонтальном направлении в то место,
в котором стопа касается земли.
14. Перейдите
к середине цикла (кадр 17) и расположите направляющую у носка стопы, как это
вы делали в кадре 1.
15. Постройте
промежуточные направляющие так, чтобы расстояние между ними было одинаковым.
Направляющая задает положение стопы в любой точке шага. (В системе с инверсной
кинематикой вы можете просто прикрепить стопу к направляющей, что позволит избежать
возможных ошибок.)
16. Теперь
следует скорректировать позу. Позиция стопы уже задана, поэтому сосредоточьтесь
на ногах. Примерно на одной четвертой первого шага (кадр 5) находится положение
отдачи, в котором нога поглощает толчок и максимально сгибается. Опустите таз
так, чтобы голень повернулась вперед, и нога согнулась в колене.
17. В результате
отдачи тело поднимается вверх в проходной позиции кадра 9. Поднимите таз, чтобы
выставленная вперед нога почти полностью выпрямилась. Она должна оставаться
слегка согнутой в колене — это придает действию естественность.
18. В данной
точке вес тела перенесен на пальцы стопы. Пятка отрывается от пола при падении
тела вперед, таз движется вниз. Свободная нога выносится вперед. Выполнение
движения может вызвать затруднения, если у персонажа очень большие стопы: они
будут задевать за пол, и их придется немного согнуть.
19. Первый
шаг завершен. Создайте вторую направляющую и повторите процедуры для левой ноги
во второй половине цикла. Постарайтесь, чтобы обе половины максимально совпадали.
Выполните рендеринг цикла и вернитесь к нему, исправив все замеченные несовпадения.
Теперь займемся
моделированием движения рук и головы. В простейшем случае для поддержания равновесия
руки делают отмашку взад и вперед в сторону, противоположную движению ног. Движения
рук слегка запаздывают, и они проходят крайнюю точку на несколько кадров позднее
крайнего положения ног.
20. Поверните
руки в кадре 1, придав им нужное положение. Правая нога выдвинута вперед, правая
рука отведена назад, а левая - вперед.
21. Проследите
за перемещением рук в крайние позиции с кадра 2 по 5. В кадре 5 поверните предплечье
правой руки назад, а левое предплечье - немного вверх.
22. Просмотрите
несколько кадров (со 2 по 5) после начала второго шага и выполните зеркальное
отражение крайней позиции из предыдущего шага. И, наконец, скопируйте ключи
из кадра 1 в последний кадр, чтобы рука раскачивалась в цикле взад-вперед.
23. Теперь
займитесь положением головы персонажа. Перейдите к ключевым кадрам в начале
и середине каждого шага и поверните голову, чтобы она оставалась в вертикальной
позиции, и глаза смотрели вперед. Голова может слегка покачиваться из стороны
в сторону, если это не слишком отвлекает внимание.
24. Сымитируйте
небольшое движение позвоночника вверх-вниз. Помните об эффекте запаздывания,
рассмотренном в главе 8. Он влияет и на движение позвоночника. При необходимости
его изгиб меняется: позвоночник то выпрямляется, то сгибается, отставая на несколько
кадров от движения таза. При перемещении бедер вверх позвоночник сжимается и
изгибается. Когда они опускаются, позвоночник с некоторым запаздыванием выпрямляется.
После анимации
цикла снимите персонаж с «беговой дорожки» и поместите его в сцену.
В ней необходимо перемещать либо сам персонаж, либо поверхность земли навстречу
ему. Второй способ подходит для панорамной съемки, где камера привязана к персонажу:
поскольку он неподвижен, она тоже не двигается. В иных случаях сам герой проходит
мимо неподвижной камеры.
В рисунках,
относящихся к пунктам 20 и 22 упражнения, допущена ошибка по вине издательства
New Riders. Положение рук и ног следует заменить на зеркальное. -Прим. ред.
В данном примере
переместите поверхность земли. Если при анимации применялись направляющие, задача
решится очень просто. Найдите абсолютное положение первой направляющей в кадре
1, а затем положение остановки в середине цикла. В рассмотренном примере направляющая
движется вдоль оси х. Первая позиция направляющей вдоль оси х соответствует
300 единицам. В кадре 17 направляющая находится на 100 единицах; нога персонажа
продвигается на 200 единиц при каждом шаге (300 - 100 = 200). Это значение называется
длиной шага. Удвоив его, получим, что длина полного цикла равна 400 единицам.
В кадре 1 поместим пол в точку отсчета. В последнем (кадр 33) переместим пол
на 400 единиц вдоль оси х. Зададим линейное значение перемещения пола в промежуточных
кадрах. Вот и все. Сцена готова.
Упражнение
3. Анимация ходьбы с использованием метода инверсной кинематики
Инверсная
кинематика является наиболее популярным способом анимации нижней части тела.
Он обеспечивает неподвижность стоящей на земле ноги во время выполнения шага.
Фиксирование ноги освобождает аниматора от заботы о досадных мелочах и позволяет
ему сосредоточиться на важных вещах, например, позе персонажа. Метод инверсной
кинематики по-разному реализуется в различных пакетах, но в большинстве из них
ИК-цепочка привязывается к эффектору, находящемуся вне иерархии скелета. В рассматриваемом
упражнении цепочки привязаны к внешним эффекторам в области лодыжки, которые
в свою очередь являются предками цепочек стоп. Анимация объекта, не входящего
в иерархию скелета, имеет то преимущество, что перемещение таза не влияет на
положение стоп. Как и в предыдущем упражнении, один шаг занимает 16 кадров,
а полный цикл составляет 32 кадра.

1. Начните
с нейтральной позы скелета.
2. Перейдите
к нижней части тела. Создайте первую позицию в кадре 1. Выдвиньте левую лодыжку
вперед, а правую назад. Переместите таз, чтобы он находился над точкой, лежащей
посередине расстояния между ступнями.,Поверните его вокруг вертикальной оси,
чтобы левое бедро выдалось вперед. Задайте ключи положения и поворота для всех
упомянутых объектов.
3. Переместите
движок к кадру 8, соответствующему проходной позиции. Выдвиньте таз вперед так,
чтобы он расположился над левой лодыжкой. Поднимите его до почти полного выпрямления
левой ноги. Разверните таз вокруг вертикальной оси в нейтральное положение.
Задайте для него ключи положения и поворота.
4. Задайте
положение правой ноги. Переместите правую лодыжку, чтобы она находилась над
левой лодыжкой и чуть ниже левого колена. Задайте ключ положения для правой
лодыжки.
5. Создайте
позу, являющуюся зеркальным отражением первой. Переместите правую лодыжку вперед,
чтобы нога твердо стояла на земле. Выдвиньте таз вперед и вниз - он должен находиться
над точкой, лежащей посередине расстояния между ступнями. Разверните таз вокруг
вертикальной оси, чтобы правое бедро слегка выдалось вперед. Задайте ключи положения
и вращения для всех перечисленных объектов и для правой ступни. Для проверки
правильности положения ног протестируйте анимацию.
6. Подправьте
шаг. Вернитесь к кадру 4, позиции отдачи, в которой таз опускается в момент
переноса веса на выдвинутую ногу. Переместите таз вниз и задайте ключ положения.
7. В позиции
отдачи правую стопу поверните и задайте ключ вращения.
8. В виде спереди
перейдите к кадру 8 (середине цикла). Таз в этой точке должен быть повернут
вправо, поскольку на свободную правую ногу действует момент силы тяжести. Поверните
таз и задайте ключ поворота. Сдвиньте таз влево, чтобы центр тяжести находился
над левой ногой. Проведите тестирование, чтобы проверить правильность воспроизведения
основного движения нижней части тела.
9. Перейдите
к верхней части тела, начав с позвоночника. В кадре 1 поверните позвонки так,
чтобы плечи были развернуты в направлении, противоположном повороту таза. Задайте
ключи поворота для позвоночника.

10. Перейдите
к кадру 8 (средняя фаза цикла). Поверните позвоночник, чтобы на виде сверху
плечи были параллельны тазу. На виде спереди поверните позвоночник - положение
плеч должно отражать положение таза. Задайте ключи поворота позвоночника.
11. Перейдите
к кадру 16. Придайте позвоночнику положение, зерка'льно отражающее положение
в первом кадре. Задайте ключи вращения для позвоночника. Шаг почти завершен.
12. Перейдите
к рукам. В кадре 1 левая нога выдвинута вперед, поэтому левая рука должна быть
отведена назад. Правая рука выдвинута вперед. Задайте ключи поворота для объектов.
Перейдите к кадру 16 и выполните зеркальное отражение этих поз, снова задав
ключи вращения.
Повторите
1-12 шаги для имитации шага правой ноги. После завершения работы выполните рендеринг
ролика.
Чтобы не работать
над каждым шагом, в реальном производстве сразу делают набросок всех движений
во время ходьбы. Затем переходят к верхней части тела, задают ключи для цикла
или копируют их в кадры анимации.
Упражнение
4. Анимация ходьбы методом инверсной или нарушенной иерархии.
В этом упражнении
выполним анимацию ходьбы с использованием метода обратной иерархии. Он хорошо
работает почти во всех пакетах, позволяет легко зафиксировать ноги и бедра,
что обеспечивает их правильное движение. Анимация может выполняться и прямым
методом. Попробуйте воспроизвести ходьбу с частотой 12 кадров в секунду (или
15 кадров в секунду для видео).
Для анимации
воспользуемся стандартным скелетом. Данный метод лучше всего подходит для несегментированных
персонажей, так как иногда довольно сложно выравнивать таз в соответствии с
вершинами ног. Идеальным вариантом был бы персонаж, таз которого скрыт, например,
женщина в юбке. Этот метод может работать с программой деформации, поскольку
небольшие зазоры между ногами и тазом обычно не заметны на деформированном каркасе.
Начните с правильного определения иерархий. Иерархическая цепочка ног разрывается
в области таза. У каждой ноги носок является предком стопы, которая, в свою
очередь, является предком голени и бедра. Направление связей в подобной цепочке
противоположно направлению связей в обычном скелете, но процесс анимации намного
проще.
1. Задайте
положение костей (или сегментов) правой ноги так, чтобы носки ног находились
на вершине иерархического дерева. Устанавливается следующий иерархический порядок:
носок является предком пятки, движение которой определяет движения голени и
бедра. Установите аналогичные связи для левой ноги.
Итак, появились
три отдельные иерархические цепочки: для верхней части скелета и две для
2. Основная
задача состоит в анимации ног и ступней. Выведите верхнюю часть тела из кадра,
поскольку она пока не понадобится. Раздвиньте ступни, выдвинув правую ногу вперед.
Чтобы придать ногам нужное положение, вначале переместите их носки, а затем
остальные звенья, поднимаясь вверх по цепочке. Положение ног определяет длину
шага. Проследите также за тем, чтобы расстояние между верхними частями ног,
где будет находиться таз, было не слишком большим.
3. Теперь выполните
анимацию оставшейся части шага. Поверните носок правой ноги и передвиньте стопу
так, чтобы она касалась земли. С этого момента и до выполнения следующего шага
стопа остается неподвижной. Обратите внимание, что суставы ноги можно поворачивать,
не изменяя положение ступни. Она зафиксирована, и проскальзывание не возникает.
4. Перейдите
вперед к кадру 13, началу следующего шага. Вы-, тяните левую ступню в горизонтальном
направлении и поверните (не перемещая) носок правой ноги в указанное на рисунке
положение.
5. Выровняйте
проходную позицию. Перейдите к кадру 7, соответствующему середине первого шага,
и поверните правую голень в лодыжке, чтобы нога почти выпрямилась. Поверните
левую ногу так, чтобы стопа приняла почти вертикальное положение, и задайте
положение бедра, повернув колено. Вершины правой и левой ног должны быть почти
на одном уровне, причем левая чуть ниже.
6. Перейдите
к кадру 4 и задайте позицию отдачи. Снова поверните правую ногу в лодыжке, чтобы
согнуть колено. Поверните и выровняйте правую стопу: нога должна висеть свободно.*
7. Создайте
ключ примерно в кадре 10, когда левая стопа выносится вперед. При использовании
метода обратной иерархии позиционирование свободной ноги может быть довольно
сложным.

8. Проиграйте
первый шаг и подправьте положение ключей.

9. Первый шаг
смоделирован. Повторив эту процедуру, можно создать необходимое число шагов.
Выполните анимацию еще трех-четырех шагов. В результате вы сымитируете движение
ног, ступающих по полу.
Этот рисунок,
предоставленный издательством New Riders, неверен. Положение ног должно соответствовать
положению ног персонажа, изображенного на рис. 9.2. - Прим. ред.
10. Выполнив
анимацию ног, поместите над ними тело и займитесь воспроизведением его движений.
В кадре 1 выровняйте положение таза относительно ног. Поверните позвоночник,
придавшему естественную осанку.
11. Перейдите
к следующему набору ключей в позицию отдачи (кадр 3). Поместите таз над ногами,
но чуть ниже, чем в исходном положении. При правильной анимации стоп и ног сделать
это будет несложно.
12. Теперь
займитесь воссозданием проходной позиции. В ней правая сторона скелета на уровне
бедер ниже левой, поэтому слегка опустите таз вправо.
13. Продолжайте
работу, размещая таз над ногами и поворачивая его в соответствии с положением
вершин ног.
14. Проиграйте
анимацию, чтобы убедиться, что центр тяжести персонажа остается над ногами.
15. Выполните
анимацию рук. Как и в предыдущем примере, они «отстают» от ног.
Если правая нога идет вперед, правая рука отводится назад, и наоборот.
16. Наконец, выполните рендеринг анимации и подправьте по необходимости отдельные кадры.
Уроки анимации